“Exoselelon” adı Yunan'dan türetilir ve “exo” (harici) ve “iskelet” (iskelet, iskelet) terimlerinden oluşur. Böceklerin veya kabukluların dış iskeletine benzer şekilde vücudu destekleyen veya koruyan dış bir yapıyı tanımlar. Bilim Bilgi Servisi (IDW) tarafından bildirildiği gibi, Fraunhofer Iwu geliştirme konusundaki yeni topraklara izin veriyor. “Form bellek alaşımları, geçiş motorları ve geçiş motorları ve 3D baskı teknolojileri ile elin anatomisi için daha iyi ve daha iyi düzenlemeler mümkündür. Her el, genellikle bir kişinin sol ve sağ eli arasında bile boyut ve oranlar değişir. Özellikle seçici lazer (SL), neredeyse sınırsız bir geometrik özgürlük sağlar, diyor araştırma ekibi. Üç boyutlu yapılar plastik toz tabakası için tabakayı oluşturur. Parametrik bir CAD modeli üretim verimliliğini önemli ölçüde artırır. İnşaat için ideal taban, sadece geometriyi değil, aynı zamanda ticaret unsurları arasındaki ilişkileri de yakalayan elin dijital 3D taramasıdır. Bu, yüksek hassas bir el modeli oluşturur ve sonraki yeni ürünler için ayarlamaların uygulanması daha kolaydır.
Her el eşsiz bir anatomi ve farklı yapılar ile karakterizedir. Çoğu hasta için, bir dış iskeletin gücünün ve hareketinin ayrı ayrı uyarlanması tavsiye edilir. Ancak, yardımın yüksek ağırlığı çok çaba gösterecektir. Kabuğun kesin bir biçimine ek olarak, birim bu nedenle merkezi bir rol oynar. Fraunhofer Iwu'da doktora öğrencisi ve Chemnitz Üniversitesi Teknik Araştırma Görevlisi Alina Carabello, çift yönlü bir pasaj motorunu aktüatör olarak form bellek ligleri telleri ile birleştiriyor. Bu sistem, motorun el ve parmakları katlamak veya uzatmak için hedefli bir şekilde kontrol ettiği sadece iki yapay tendon kullanır. Gerekirse farklı pozisyonlar korunabilir ve düzenlenebilir. Carabello, “Örneğin, bir şişe mineral plastik suyu için bir RI -rolü gereklidir, bu da kapanır açık olur olmaz ve karbondioksit kaçabilir” diyor Carabello.
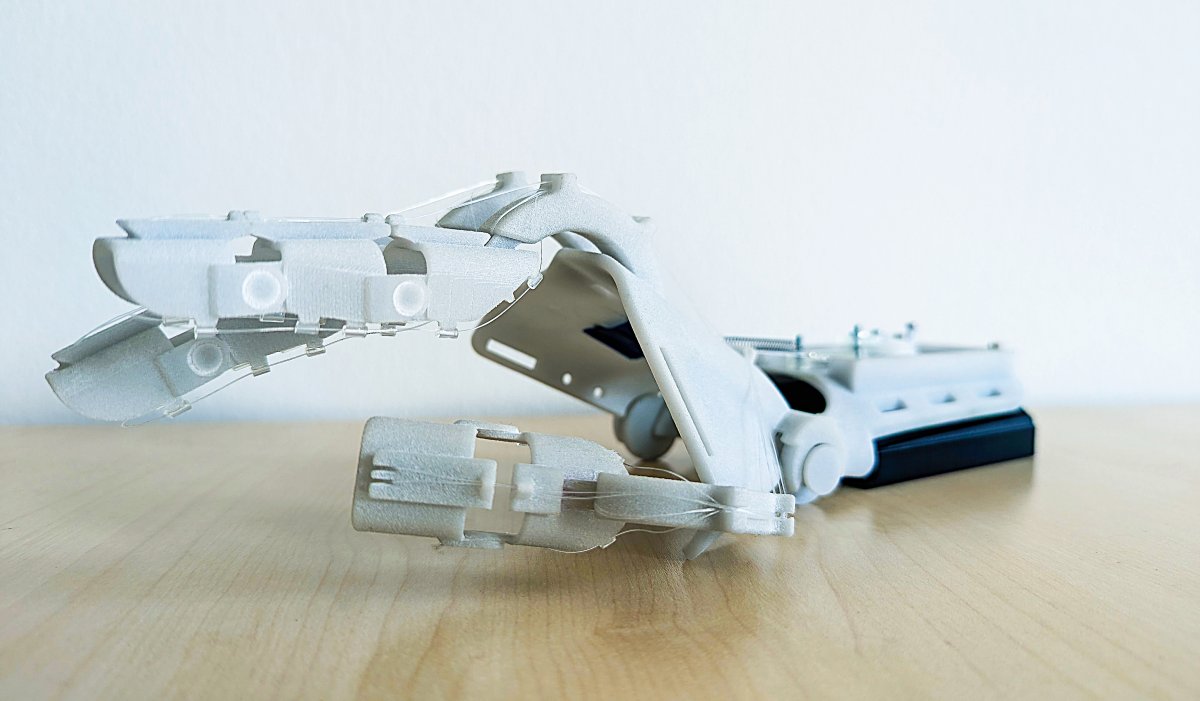
Sürücü Sistemi
Sürücü sistemi basit prensiplere göre çalışır. Hızın geçişi dişli, kol, jack ve özel bir ipliği birleştirir. Isıtılırsa, iş parçacığı sözleşir ve kolu tanımlanmış bir köşeye taşır. Bu, yürüyüşü istenen yöne çevirirken, fleksörün halatı veya germe tendonunun bir bobin üzerinde kapatılması veya işlenmesi. Bu hareket parmağı bükür veya uzatır. Karabulasyon sistemi durumunda, bellek formları (FGL) dişlilerin hareketini aktüatör olarak kontrol eder. Bir mikrodenetleyici özellikle FGL telini elektrik akımı ile ısıtır ve bu da onu azaltır. Soğutma sırasında, iplik bir yay veya başka bir FGL teli gibi bir dönüşe uzanır. Bu tamirci dış iskeletin yapay uzuvlarını yönlendirir. Genel olarak, bu hassasiyet ve tekrarlanabilir ile elde edilebilir.
FAI -DA alanında dış iskelet -te
Exoskelettes'in geliştirilmesi sadece teknik ve pratik engeller karşısında araştırma sektöründe değil. Karbon veya alüminyum gibi ışık bileşenleri pahalıdır ve hassas sürüş sistemleri mekatroniklerde uzman bilgi gerektirir. Bununla birlikte, 3D baskı ve açık kaynak platformları gibi teknolojiler, FAI -DA -TE alanında yaratıcı çözümler geliştirmenizi sağlar. Bunun başarısının bir örneği, Profesör Zach Lerner ve Kuzey Arizona Üniversitesi (NAVA) ekibinin açık kaynaklı Exoskelett Açık Kaynağı'nın yayınlanmasıdır. 25 Haziran 2025'te Science Robotics dergisinde yayınlanan OpenExo projesi, hobilere güçlü modeller geliştirme fırsatı sunuyor. Proje, kalça, ayak bileği ve dirsek konfigürasyonları da dahil olmak üzere bireysel ve çok eklemli dış iskeleti kontrol etmek için 3D baskı ve tasarım verilerinin yanı sıra Python yapım ve yazılım yapım talimatlarını içeriyor.
(USZ)
Bir yanıt yazın